Wi‑Fi Controlled Vehicle
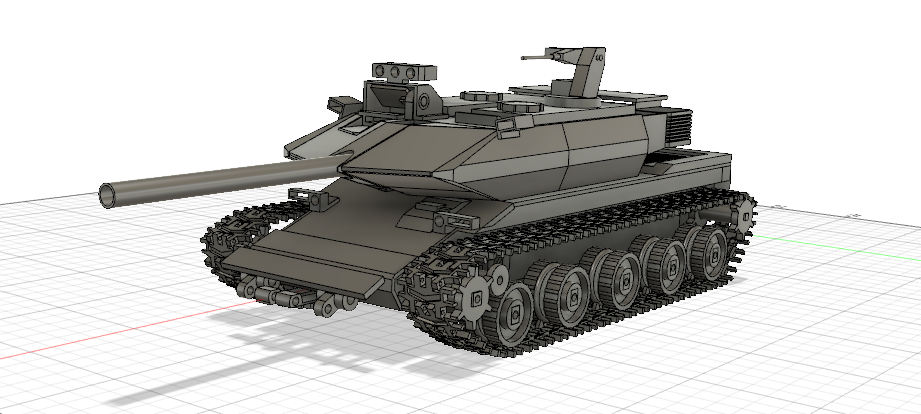
The project started as a concept of a modular mobile base for robotic exploration, based on an ESP microcontroller with the ability to add different radio modules for different frequencies. The addition of a tank turret was a fun idea I had in mind and a good proof of concept of a vertical stabilizer with accelerometer in addition to a camera for live video feed.
Project Details
Concept: Modular mobile platform designed for exploration and surveillance applications. The base design allows for easy integration of various sensors and communication modules.
Key Features:
- ESP32-based control system with Wi-Fi connectivity
- Modular radio communication system supporting multiple frequencies
- Real-time video streaming via integrated camera module
- Vertical stabilizer system with accelerometer feedback
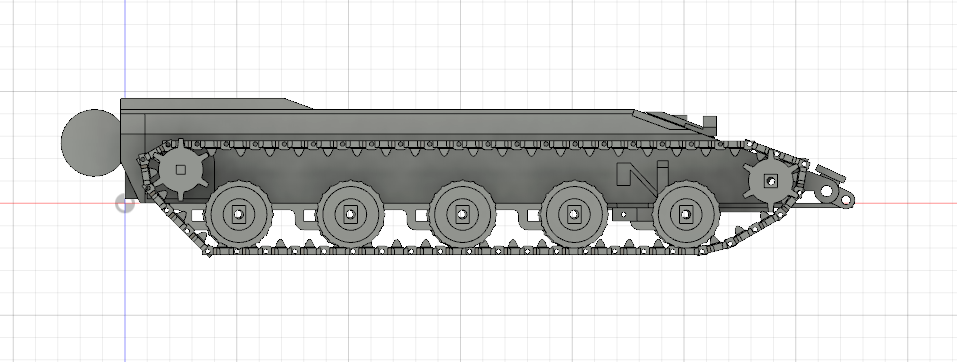
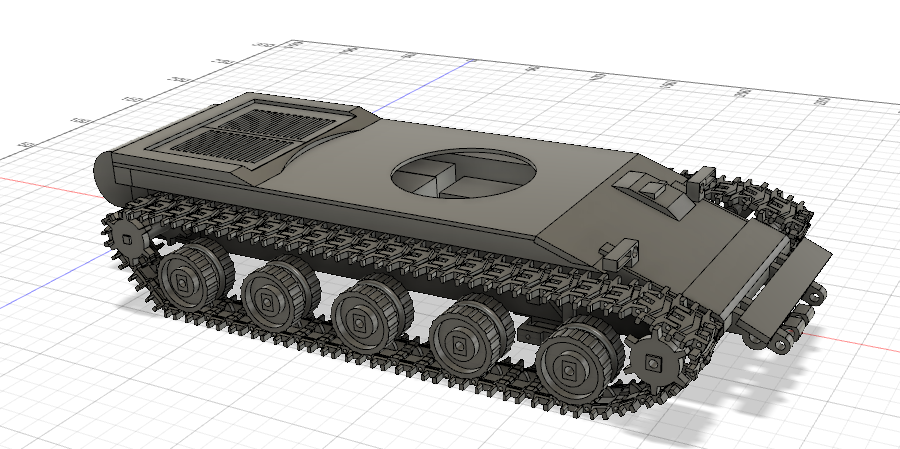
- 3D-printed chassis and components for customization
- Recycled materials integration for sustainable design
Technical Implementation: The system uses C/C++ programming for low-level control, with sensor integration for stability and navigation. The modular design allows for easy upgrades and different payload configurations.
Technologies
Project Gallery