WLAN‑gesteuertes Fahrzeug
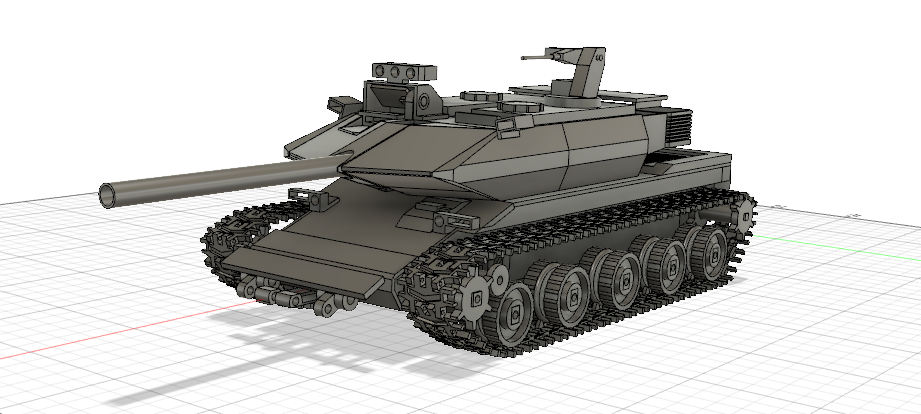
Das Projekt begann als Konzept einer modularen mobilen Basis für robotische Erkundung, basierend auf einem ESP‑Mikrocontroller mit der Möglichkeit, verschiedene Funkmodule für verschiedene Frequenzen hinzuzufügen. Die Hinzufügung eines Panzerturms war eine lustige Idee, die ich im Kopf hatte, und ein guter Machbarkeitsnachweis für einen vertikalen Stabilisator mit Beschleunigungsmesser zusätzlich zu einer Kamera für Live‑Videoübertragung.
Projektdetails
Konzept: Modulare mobile Plattform für Erkundungs‑ und Überwachungsanwendungen. Das Grunddesign ermöglicht eine einfache Integration verschiedener Sensoren und Kommunikationsmodule.
Hauptmerkmale:
- ESP32‑basiertes Steuerungssystem mit WLAN‑Konnektivität
- Modulares Funkkommunikationssystem mit Unterstützung mehrerer Frequenzen
- Echtzeit‑Videostreaming über integriertes Kameramodul
- Vertikales Stabilisierungssystem mit Beschleunigungsmesser‑Rückmeldung
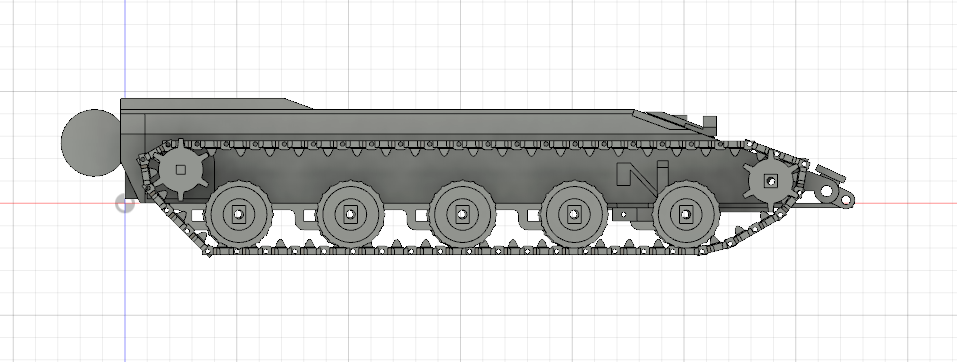
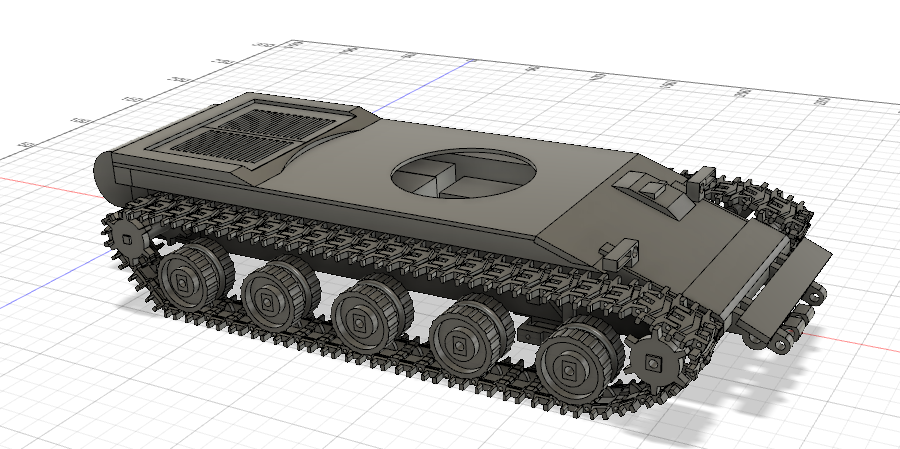
- 3D‑gedrucktes Chassis und Komponenten für Anpassung
- Integration recycelter Materialien für nachhaltiges Design
Technische Umsetzung: Das System verwendet C/C++‑Programmierung für Low‑Level‑Steuerung mit Sensorintegration für Stabilität und Navigation. Das modulare Design ermöglicht einfache Upgrades und verschiedene Nutzlastkonfigurationen.
Technologien
Projektgalerie