Autonomous Exploration Robot
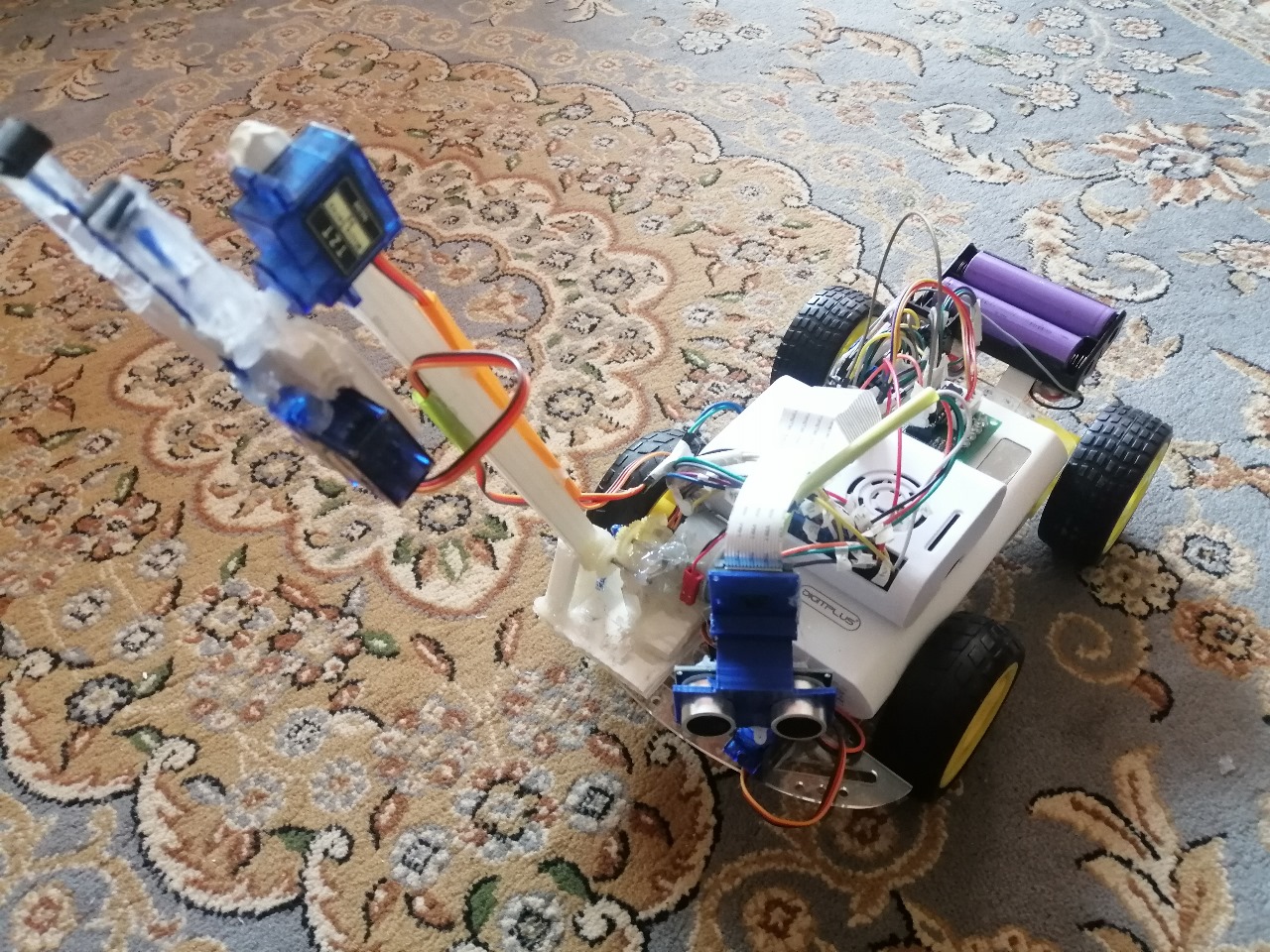
This was my final study project - a self-driven robot that avoids obstacles using ultrasonic sensors and features an arm that picks up objects and transfers them to a dedicated area. The idea was to create a proof of concept for exploration or intervention in hard-to-reach areas, with the ability to extend functionality to include scanners or AI self-driving capabilities.
Project Overview
Objective: Develop an autonomous robot capable of navigation, obstacle avoidance, and object manipulation for exploration and intervention tasks in challenging environments.
Core Concept: The robot serves as a mobile platform that can operate independently or under remote supervision, making it ideal for applications in hazardous environments, search and rescue operations, or industrial inspection tasks.
Technical Implementation
Hardware Architecture:
- Raspberry Pi 4: Main processing unit running Python-based control algorithms
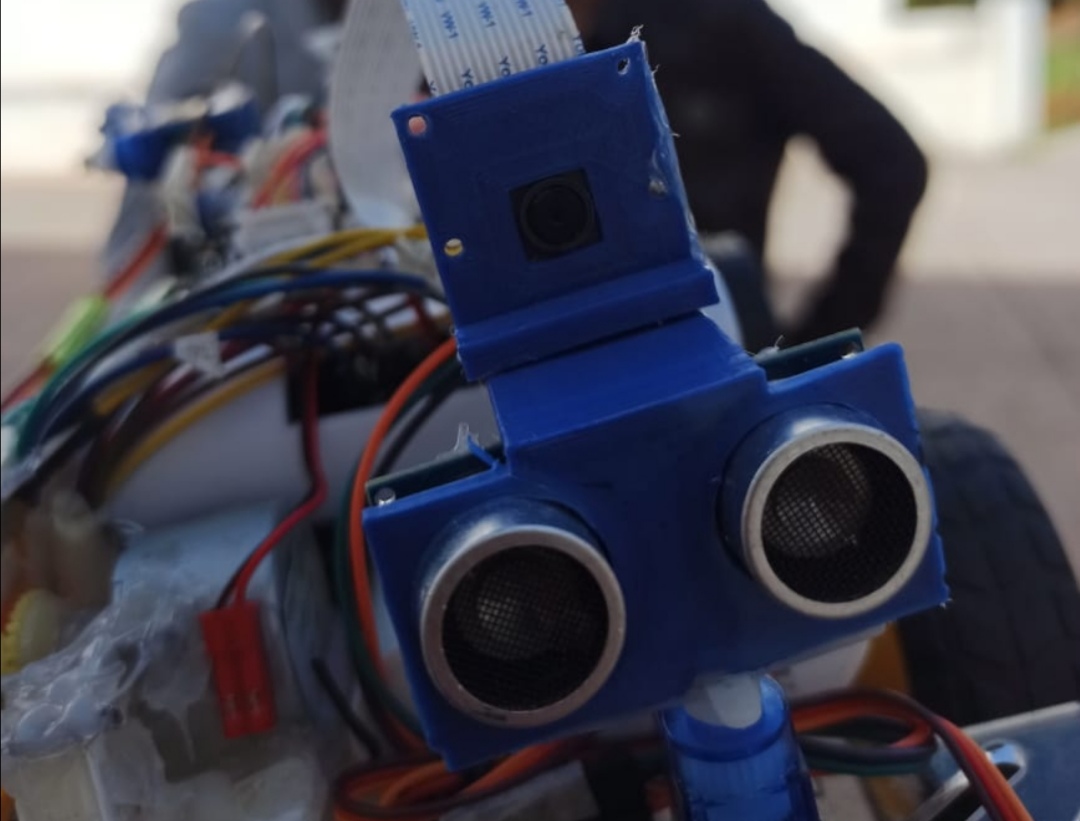
- Ultrasonic Sensors: Multiple sensors for 180-degree obstacle detection and avoidance
- Robotic Arm: Arm gripper for object handling
- Camera System: Real-time video feed for remote monitoring and navigation assistance
- Wi-Fi Module: Wireless communication for remote control and data transmission
- Motor Control: Differential drive system for precise movement and turning
Software Stack:
- Python: Main programming language for control algorithms and sensor integration
- GPIO Control: Hardware interface for sensor and motor management
- Web Interface: Remote control dashboard for real-time monitoring
Key Features
- Autonomous Navigation: Self-driving capability with obstacle avoidance algorithms
- Object Manipulation: Pick and place functionality with precision control
- Remote Operation: Wi-Fi controlled with live video streaming
- Real-time Monitoring: Live telemetry and video feed for operator oversight
Applications & Future Extensions
The robot demonstrates potential for various applications including:
- Search and rescue operations in disaster zones
- Industrial inspection in hazardous environments
- Exploration of confined or dangerous spaces
- Automated material handling in warehouses
Future Enhancements: The modular design allows for integration of additional sensors (LIDAR, thermal cameras), AI-based navigation, and specialized tools for specific applications.
Technologies
Project Gallery