Modular Multipurpose Drone

This was my first drone concept - a modular design that serves multiple goals with a range of 1km+ radius. The drone was built from scratch, including both the design and remote controller, featuring a modular architecture that allows for different payloads and mission configurations.
Project Concept
Modular Design Philosophy: The core idea was to create a versatile drone platform that could be easily reconfigured for different applications by swapping out modules and payloads. This approach maximizes utility while minimizing development time for specific use cases.
Multi-Purpose Applications: The modular design enables the drone to serve various functions including aerial photography, environmental monitoring, and research applications.
Technical Architecture
Communication System:
- NRF24L Radio Module: Long-range 2.4GHz communication with 1km+ radius coverage
- Custom Remote Controller: Built from scratch with dedicated control interface
- Real-time Telemetry: Live data transmission for flight monitoring
Flight Control System:
- Accelerometer Integration: Stabilization feedback for smooth flight control
- ESC (Electronic Speed Controllers): Precise motor control for stable flight
- Servo Motors: Movement control for gimbal and modular components
Modular Components:
- Interchangeable Payloads: Camera modules, sensors, cargo containers
- 3D-Printed Mounts: Custom mounting systems for different modules
- Quick-Connect System: Rapid module swapping without tools
- Power Distribution: Modular power system for different payload requirements
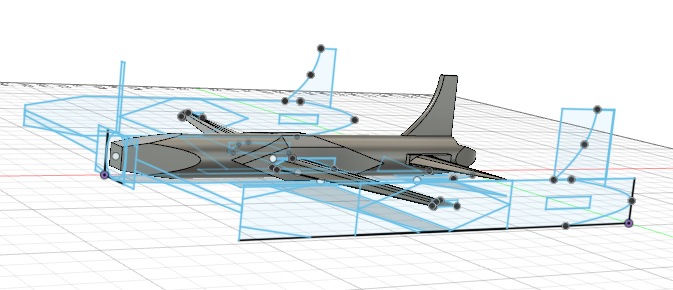
Design & Development
From-Scratch Development: The entire system was designed and built from the ground up, including:
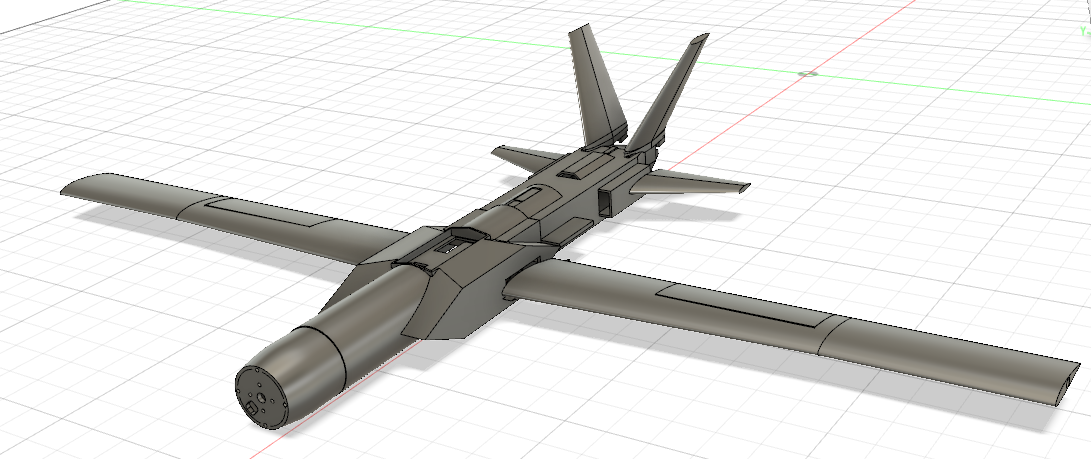
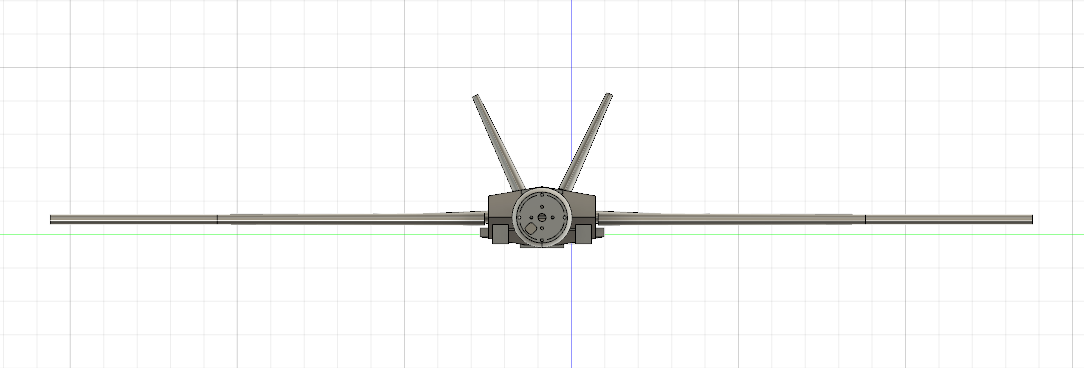
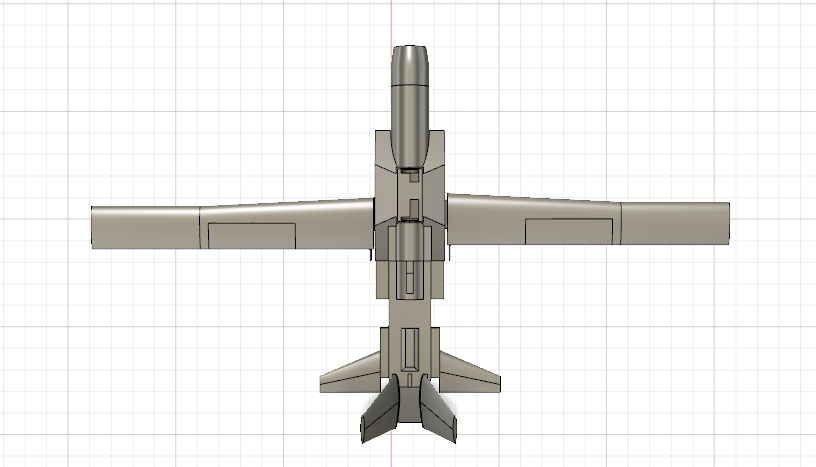
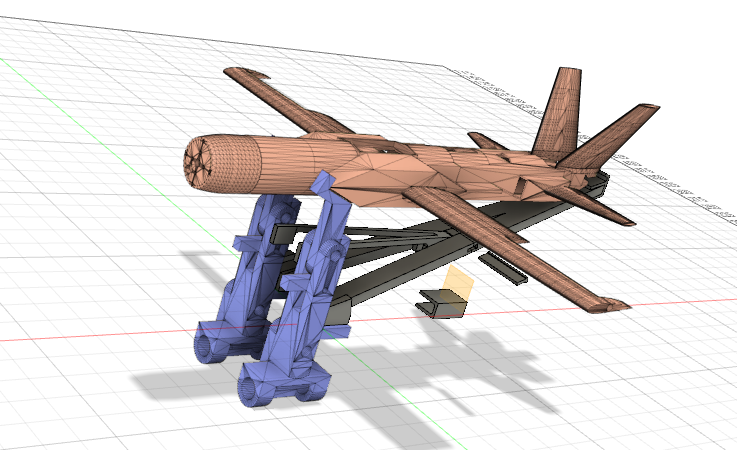
- Custom airframe design optimized for modularity
- Custom launch platform
- Proprietary flight control algorithms
- Custom remote controller with intuitive interface
- Modular power management system
- 3D-printed components for rapid prototyping
Programming & Control:
- C/C++: Low-level programming for flight controller and communication
- Sensor Fusion: Integration of multiple sensor inputs
Key Features
- Long Range Operation: 1km+ communication radius for extended missions
- Modular Payload System: Easy swapping of different mission modules
- Stable Flight Control: Advanced stabilization with accelerometer feedback
- Custom Remote Controller: Purpose-built control interface
- Real-time Monitoring: Live flight data feed
Applications & Use Cases
The modular design enables various applications:
- Aerial Photography: High-quality camera modules for professional imaging
- Environmental Monitoring: Sensor modules for data collection
- Research Applications: Custom payloads for scientific studies
- Emergency Response: Rapid deployment for search and rescue
Technical Specifications
- Communication Range: 1km+ radius with NRF24L module
- Flight Time: 15-25 minutes depending on payload (5000 mah Battery)
- Payload Capacity: Plane weighs 750g and capable of up to 500g modular payloads
- Operating Frequency: 2.4GHz ISM band
- Control System: Custom C/C++ firmware
- Stabilization: Accelerometer-based feedback control
Technologies
Project Gallery